NoMaDbot™
04/16/2024
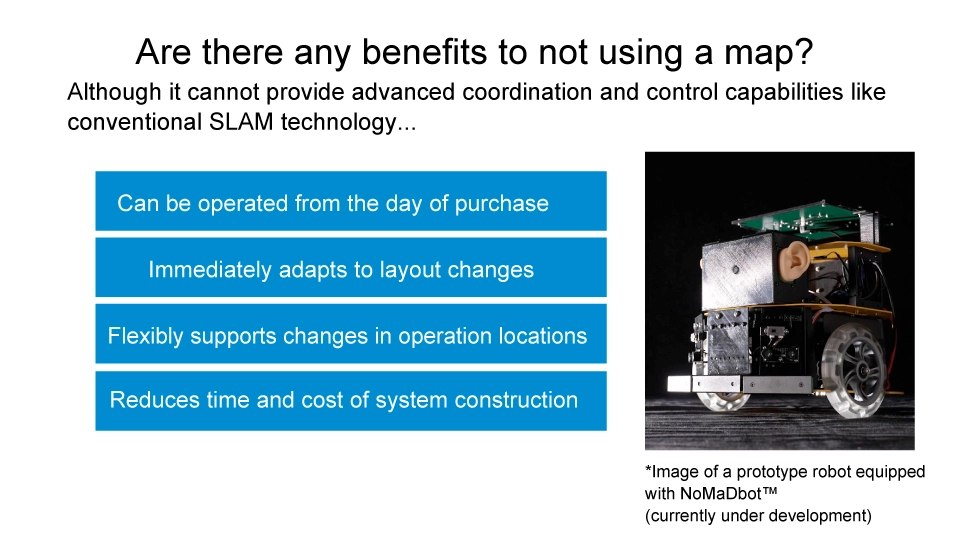
Image of a prototype robot equipped with NoMaDbot™ (currently under development)
Contents
- 1. Challenges Faced in the Field Following the Widespread Adoption of AGVs and AMRs
- 2. Living Things Can Reach Their Destination Without a Map
- 3. NoMaDbot™ Core Technology 1: Determining Direction
- 4. NoMaDbot™ Core Technology 2: Echolocation
- 5. Direction Estimation + Echolocation = No Map Needed
- 6. Further Advantages of ‘Mapless’ Robot Driving Technology
- 7. The Reason ROHM Began Developing Autonomous Driving Technology
- 8. NoMaDbot™ Application Areas
- 9. NoMaDbot™’s Vision for the Future of Industrial Society
- Product Information and Related Links
The roles of AGVs (Automated Guided Vehicles) and AMRs (Autonomous Mobile Robots) are expanding in the logistics and manufacturing sectors. In the midst of labor shortages, AGVs and AMRs that can work alongside people in factories and warehouses are becoming valuable assets for the entire industry.
However, AGVs require guides such as magnetic tape or 2D markers attached to the floor to set the route, while AMRs cannot operate immediately after purchase. High risk is involved since navigation plans and mapping are required before the system can be operational, which takes an enormous amount of time and money to implement. Furthermore, when considering emergency response and maintenance in the event of problems, it should come as no surprise that the barrier to adoption remains quite high. In fact, many find that the cost of introduction is not worth the effort – depending on the tasks they want to assign to AGVs or AMRs.
As a result, ROHM is quietly developing a new cost-effective robot navigation technology that can be quickly deployed in situations where utilizing AGVs and AMR are impractical or unnecessary. This represents a completely new type of robotic solution that can bring greater convenience to society in the future. In this article, we will discuss ROHM's new navigation technology NoMaDbot™ (No Map Driving Robot).
*NoMaDbot™ is a trademark or registered trademark of ROHM Co., Ltd.
**The information contained in this document is current as of Dec. 2023.
1. Challenges Faced in the Field Following the Widespread Adoption of AGVs and AMRs
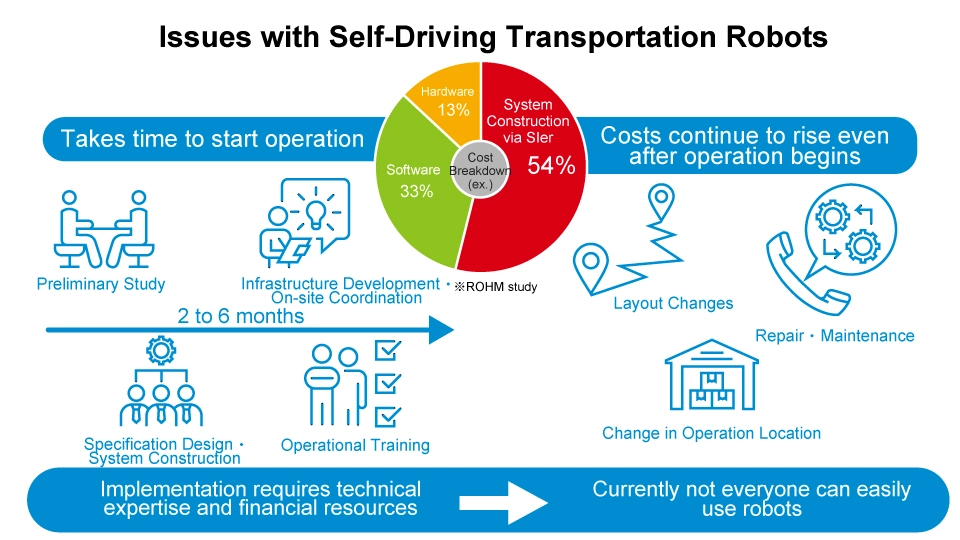
Transportation robots like AGVs and AMRs are expanding their roles in industrial facilities, factories, and logistics sites as smart technologies continue to progress. However, a number of issues have emerged following this advancement.
AMRs in particular have been attracting attention in recent years due to their advanced functionality that can improve operating environments. However, many are hesitant to introduce such systems for reasons that include high implementation costs, the need for specialized SIers (System Integrators: engineers who build the system), time-consuming setup, and frequent system freezes.
Many simple tasks in the field do not require high-performance robots.
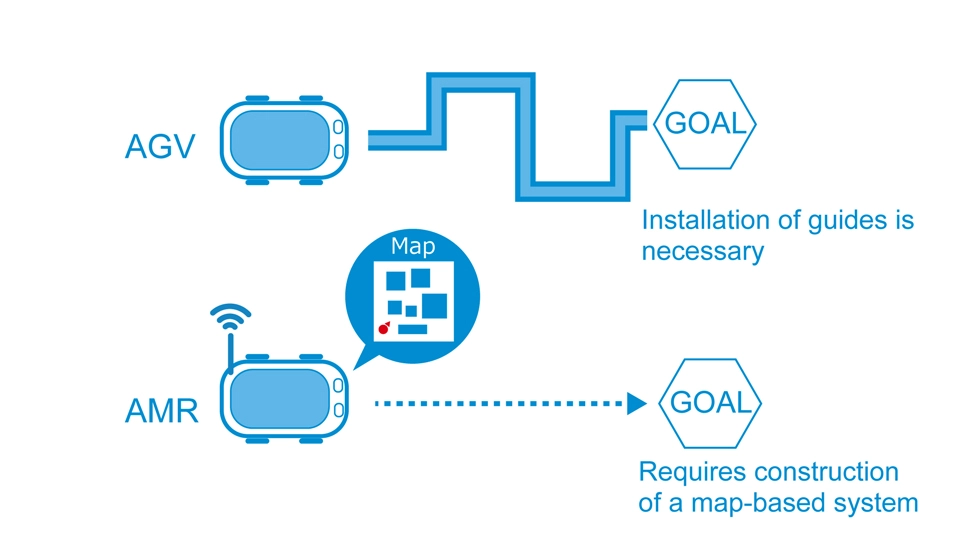
For example, when transporting an object from A to B with conventional AGVs, it is necessary to install guides using magnetic tape, etc. And AMRs are even more complicated, utilizing a technology called SLAM (Simultaneous Localization and Mapping) to simultaneously perform self-localization and mapping. But implementation requires specialized engineers called SIers to design specifications and navigation plans for the facility, since the system can only be operated once a map is created. As such, it can take as long as several months after purchase to become fully operational. Also, if the facility layout changes, this entire process may have to be repeated.
While high-performance transport robots such as AMRs can be very effective in environments with complex routes, facilities demanding precision and speed, and layouts that do not change over time, for simple tasks such as transporting waste or defective products to a disposal area or delivering packages from A to B, advanced performance and coordination functions are not required. On the contrary, in environments like distribution warehouses, supermarkets, and event halls where the layout changes frequently, the time-consuming process of constructing a map-based system presents a significant deterrent in the adoption of existing transport robots.
Is it possible to make a simpler, lower-cost transport robot that ‘just carries’?
Based on such customer feedback, we began developing a new robot navigation technology called NaMaDbot™.
2. Living Things Can Reach Their Destination Without a Map
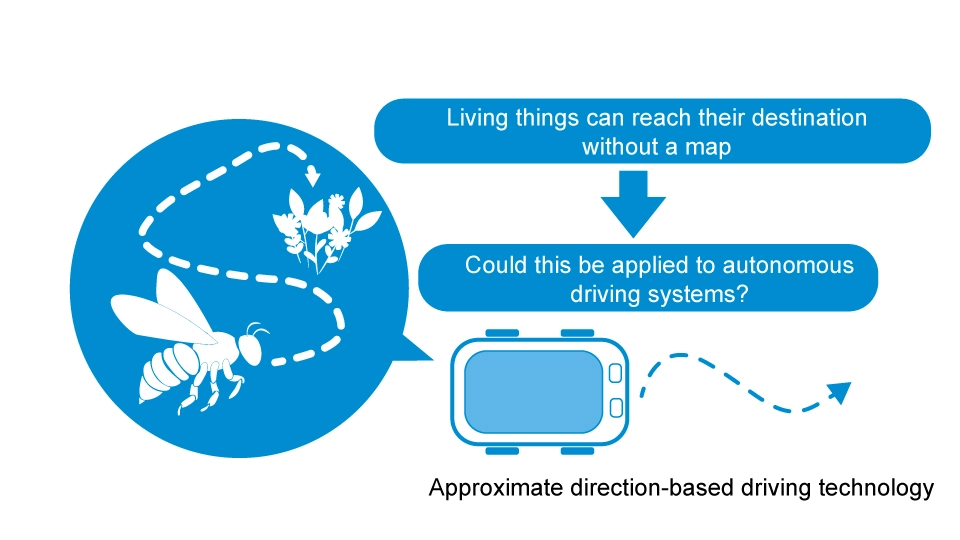
The development of NoMaDbot™ began with the premise that ‘living things can reach their destination without a map.’
For example, animals and insects head to their destination starting with a rough direction, approximate distance, and situational judgment at that moment.
Humans are the same. We may rely on maps and navigation when traveling long distances, but not for a trip to the local supermarket. In fact, even if it’s a supermarket you've never been to, you should be able to get there as long as you know the general direction and distance. Also, if a road is closed for construction or there are obstacles such as parked cars, you can adapt quickly to the situation by avoiding them or taking a detour.
So the question becomes, ‘Is it possible to equip transportation robots with flexible autonomous navigation capability similar to that of living things?’
The NoMaDbot™ development team's goal was to determine how to estimate the approximate direction to the destination while detecting and avoiding obstacles along the way.
3. NoMaDbot™ Core Technology 1: Determining Direction
NoMaDbot™ stands for No Map Driving Robot. Basically, it means autonomous driving technology that does not use maps.
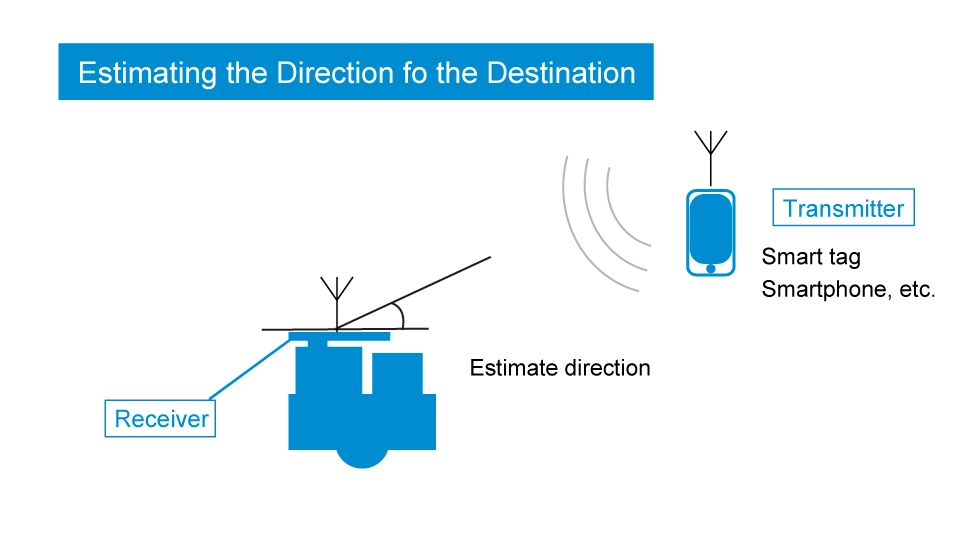
The first core technology that makes this possible is ‘orientation estimation’ for determining the direction to the destination.
With NoMaDbot™, the destination is a smart tag that serves as a transmitter (potentially a smartphone in the future). NoMaDbot™ detects radio waves emitted from the transmitter to estimate its orientation.
It can only advance towards the destination smart tag, but this is sufficient for simple transport purposes.
And although it is not possible to program complex routes like AMR, it is possible to perform actions such as ‘delivering a package from A to B then C,’ by combining multiple smart tags and switching them sequentially.
4. NoMaDbot™ Core Technology 2: Echolocation
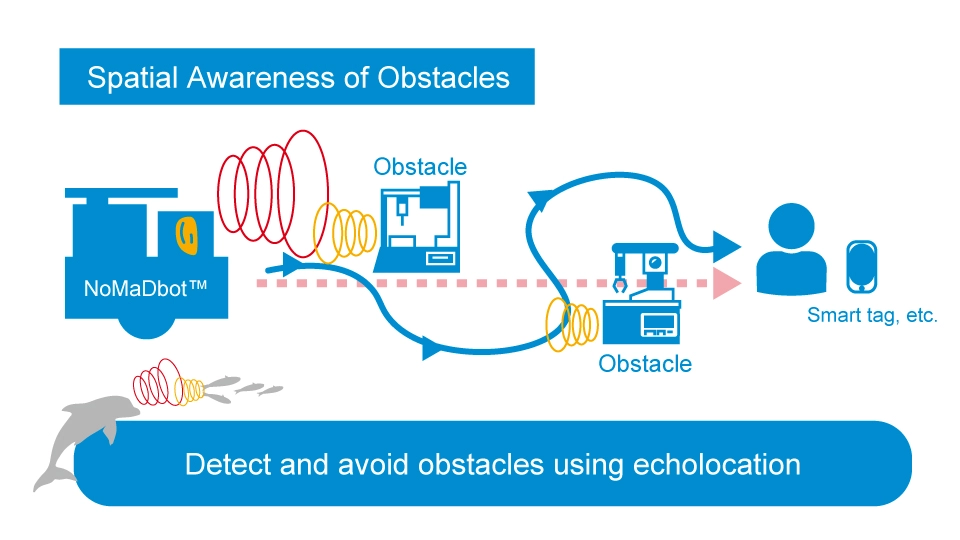
Another core technology is ‘echolocation’ for avoiding obstacles along the way.
Echolocation is the process of detecting and understanding the distance, direction, and size of objects by analyzing the reflection of emitted ultrasonic waves or sound. This technology was inspired by dolphins, whales, and bats who use echolocation to achieve spatial awareness.
Incorporating echolocation in its navigation algorithm allows the NoMaDbot™ to detect and avoid obstacles.
5. Direction Estimation + Echolocation = No Map Needed
Combining the two core technologies of ‘direction estimation’ and ‘echolocation’ makes it possible to achieve the world's first* completely new autonomous driving technology (developed in Japan) that doesn’t require a map.
While it may not offer advanced coordination and control like traditional SLAM-based AMRs, it is well-suited for numerous situations where the task is simply to ‘transport goods’. Moreover, adopting this new navigation technology eliminates the need for SIers to build map-based systems, enabling immediate operation from day one. And naturally it is unaffected by changes in facility layout or operational location.
*Dec. 2023 ROHM study
6. Further Advantages of ‘Mapless’ Robot Driving Technology
The benefits of not requiring a map go beyond just cost reduction and faster implementation speed.
Since no map is used to begin with, the system never freezes from losing its position. In other words, it is a robust autonomous driving system that is resistant to unexpected situations.
At the same time, the NoMaDbot™ driving algorithm does not aim at a fixed point on the map, but rather the transmitter such as a smart tag, so that even if the destination moves, as long as it is within radio range, it can be reached without problems.
It can also perform tasks that would be difficult with conventional SLAM-based driving technology alone, such as ‘delivering a package by tracking Mr. A, whose location is changing in real time,’ or ‘following and transporting packages while following Mr. A.’
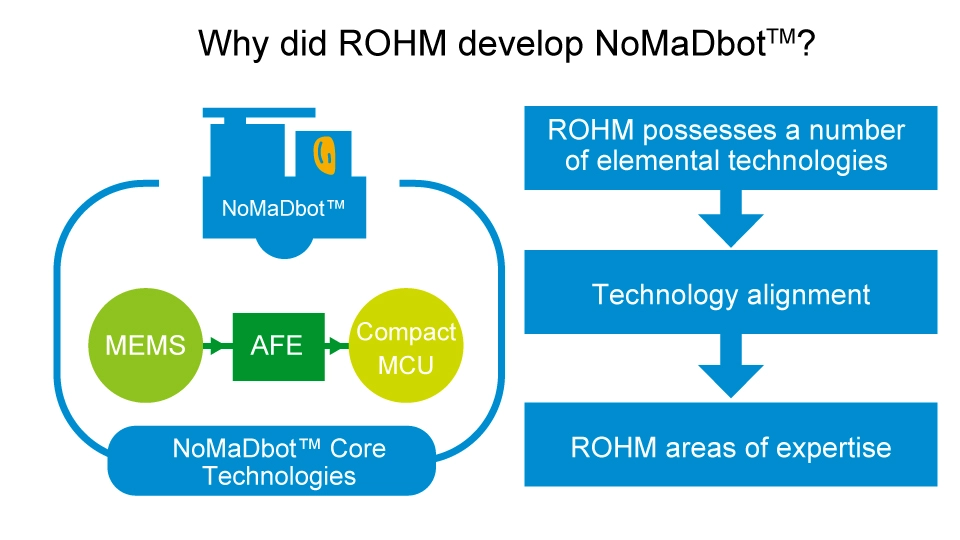
7. The Reason ROHM Began Developing Autonomous Driving Technology
So why did ROHM begin developing autonomous driving technology?
ROHM hopes to achieve a society where everyone can use autonomous robots.
ROHM leverages many elemental technologies such as MEMS, AFE, and small MCUs to create new solutions that align with its expertise in the field, including the world’s first driving technology NoMaDbot™.
8. NoMaDbot™ Application Areas
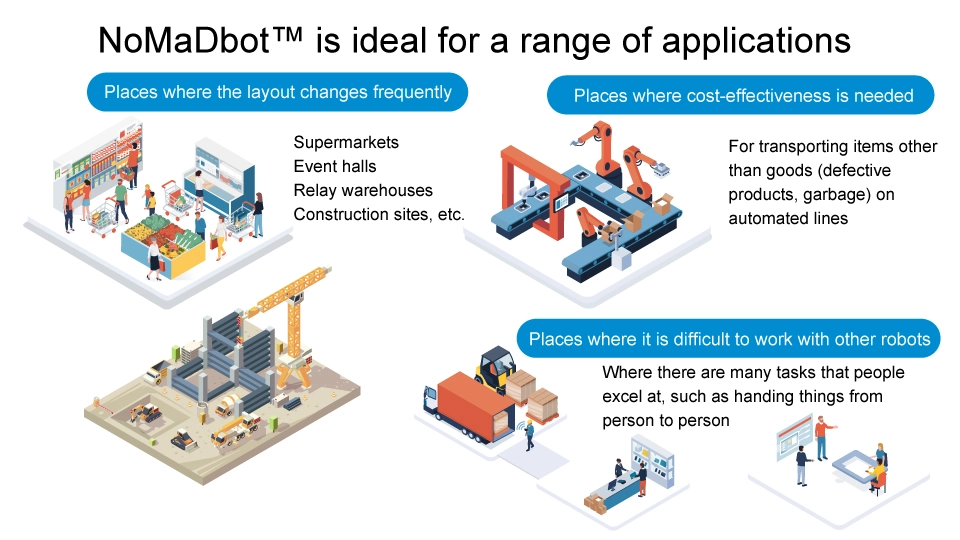
ROHM would like to emphasize that NoMaDbot™ is in no way intended to deny or compete with AGV or AMR technologies.
AGV is suitable for cases where the travel route has been predetermined and AMR when full automation is required, while NoMaDbot™ is ideal if cheap and easy automation is needed.
For example, in places where the layout changes frequently depending on the time of day or season, such as relay warehouses, or where things need to be passed from one person to another, such as supermarkets, event halls, and construction sites. It is intended for use in factories and other places where defective products and garbage other than goods are transported. If the only task is to transport things, it is a much simpler and more convenient option than AGVs and AMRs. This is where NoMaDbot™ excels.
As development progresses, we can expect to see even more convenient and wide-ranging applications and environments, such as following people carrying smart tags or linking with smartphone apps.
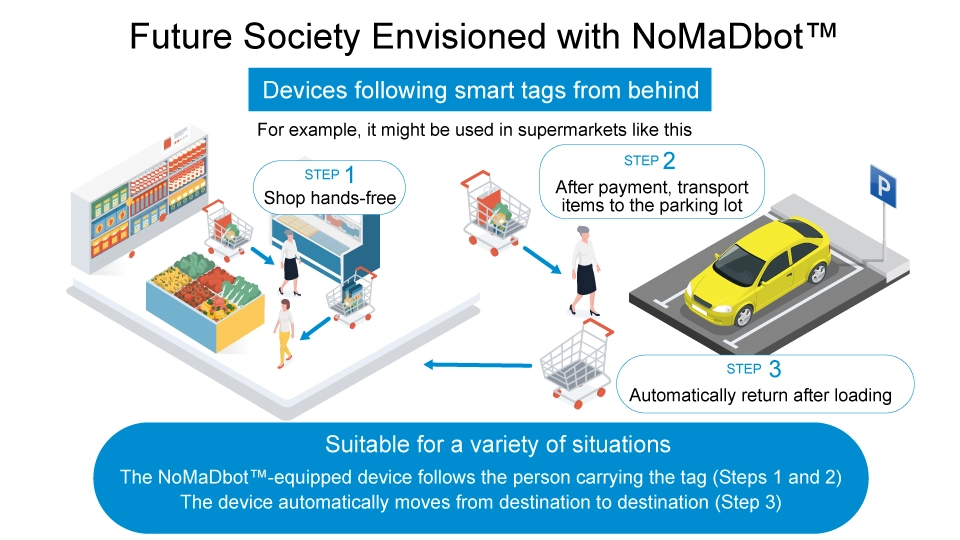
9. NoMaDbot™’s Vision for the Future of Industrial Society
The goal of NoMaDbot™ is to ‘create a society where autonomous robots can be used by everyone.’
In situations where high-performance robots are not required, the use of simple transport robots that can be handled more easily at lower cost will improve productivity and contribute to the promotion of automation in manufacturing and logistics.
What’s more, by leveraging the concept of sensor fusion, NoMaDbot™ has the potential to evolve even further. Although we are currently developing the system only on the ground, in the future we plan on enabling operation in special environments including the sky and sea, so please stay tuned.